رباتیک توانبخشی
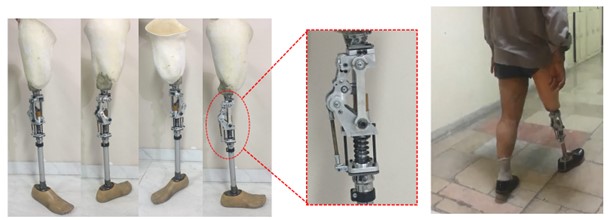
پای مصنوعی طراحی شده در گروه رباتیک توانبخشی
هوش مصنوعی و رباتیک توانبخشی
شاخهای از علم رباتیک و هوش مصنوعی به شناسایی و مدلسازی رفتاری و حرکتی انسان و طراحی رباتهای انساننما با الهام از طبیعت میپردازد. در سالهای اخیر دانش انباشته در این شاخه از رباتیک در راستای ارائه راه حلهایی کاربردی برای کمک افراد ناتوان جسمی (افراد سالخورده، معلولان و بیماران جسمی و حرکتی و افراد قطع عضو) مورد استفاده قرار گرفته است. مدلسازی بیومکانیکی حرکات انسان در بالاتنه (حرکات دست) و پایین تنه (راه رفتن)، طراحی اندام مصنوعی (دست مصنوعی و پای مصنوعی)، طراحی رباتهای پوشیدنی (همچون اسکلتهای خارجی فعال و غیرفعال)، جایگذینی سنسوری، طراحی بازی به منظور توانبخشی شناختی و ... از جمله زمینههای تحقیقاتی در این حوزه از رباتیک است.
پروژه ها:
- طراحی و ساخت دست مصنوعی ارزان قیمت با الهام از عملکرد دست انسان
- انتقال اطلاعات تصویری به کمک صوت به افراد نابینا
- جایگذینی حس لامسه با بازخورد پوستی در دست مصنوعی هوشمند
- حضور از راه دور توسط سیستمهای رباتیکی
- طراحی، ساخت و کنترل اسکلت خارجی برای کمک به افراد ناتوان جسمی
اساتید:
واحدهای همکار:
- موسسه پژوهشی رباتیک، هوش مصنوعی و علوم داده
- آزمایشگاه سیستمهای شناختی
- آزمایشگاه رباتیک پیشرفته و سیستم های هوشمند
- دانشگاه تهران - دانشکده مکانیک
- دنشگاه علوم پزشکی و خدمات بهداشتی درمانی ایران - دانشکده علوم توانبخشی
مقالات برگزیده:
- Nasiri, R., Ahmadabadi, M. N., & Ahmadi, A. (2020). U.S. Patent No. 10,549,138. Washington, DC: U.S. Patent and Trademark Office.
- Nasiri, R., Dinovitzer, H., & Arami, A. (2023). Coordinated human-exoskeleton locomotion emerges from regulating virtual energy. bioRxiv, 2023-09.
- Rayati, M., Nasiri, R., & Ahmadabadi, M. N. (2022). Improving Muscle Force Distribution Model Using Reflex Excitation: Toward a Model-Based Exoskeleton Torque Optimization Approach. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 31, 720-728.
- Mohseni, O., Davoodi, A., Ahmadi, A., Firouzi, V., Nasiri, R., & Ahmadabadi, M. N. (2022, November). Coupling of Body Mechanics and Control for Robust and Efficient Quadrupedal Gait Generation. In 2022 10th RSI International Conference on Robotics and Mechatronics (ICRoM) (pp. 29-35). IEEE.
- Nasiri, R., Dinovitzer, H., & Arami, A. (2022, July). A Unified Gait Phase Estimation and Control of Exoskeleton using Virtual Energy Regulator (VER). In 2022 International Conference on Rehabilitation Robotics (ICORR) (pp. 1-6). IEEE.
- Qiu, W., Martinez, K. B., Nasiri, R., & Rouhani, H. (2022). Human Hand Model Development: Towards a Dynamical Simulation Platform for a Hand Exoskeleton Design.
- Chao, E., Qiu, W., Estaji, Z., Nasiri, R., & Rouhani, H. (2022). Design of a New Mechanism for a Hand Exoskeleton.
- Nasiri, R., Aftabi, H., & Ahmadabadi, M. N. (2022). Human-in-the-Loop Weight Compensation in Upper Limb Wearable Robots Towards Total Muscles’ Effort Minimization. IEEE Robotics and Automation Letters, 7(2), 3273-3278.
- Shushtari, M., Nasiri, R., & Arami, A. (2021). Online reference trajectory adaptation: A personalized control strategy for lower limb exoskeletons. IEEE Robotics and Automation Letters, 7(1), 128-134.
- Nasiri, R., Shushtari, M., & Arami, A. (2021). An adaptive assistance controller to optimize the exoskeleton contribution in rehabilitation. Robotics, 10(3), 95.
- Nasiri, R., Shushtari, M., Rouhani, H., & Arami, A. (2021). Virtual energy regulator: A time-independent solution for control of lower limb exoskeletons. IEEE Robotics and Automation Letters, 6(4), 7699-7705.
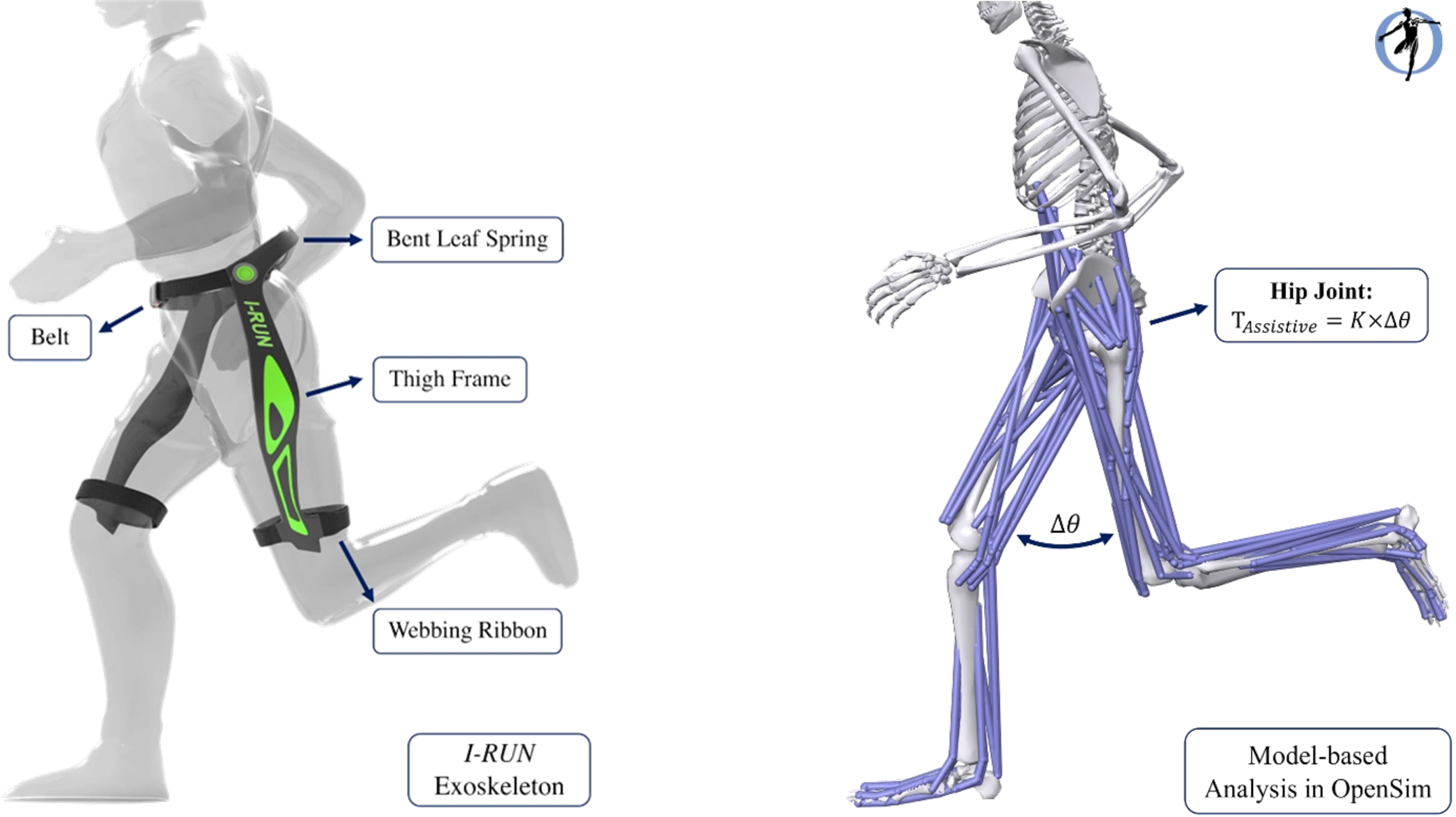
- Aftabi, H., Nasiri, R., & Ahmadabadi, M. N. (2021). Simulation-based biomechanical assessment of unpowered exoskeletons for running. Scientific Reports, 11(1), 11846.
- Nasiri, R., Shushtari, M., & Arami, A. (2021). An Adaptive Assistance Controller to Optimize the Exoskeleton Contribution in Rehabilitation. Robotics 2021, 10, 95.
- Nasiri, R., Aftabi, H., Rayati, M., & Ahmadabadi, M. N. (2020). Human-in-the-Loop Weight Compensation and Mass Estimation in Upper Limb Wearable Robots Towards Muscles’ Effort Minimization. bioRxiv, 2020-11.
- Aftabi, H., Nasiri, R., & Ahmadabadi, M. N. (2020). A kinematic index for estimation of metabolic rate reduction in running with I-RUN. bioRxiv, 2020-08.
- Nasiri, R., Ahmadabadi, M. N., & Ahmadi, A. (2023). U.S. Patent No. 11,554,282. Washington, DC: U.S. Patent and Trademark Office.
- Nasiri, R., Ahmadi, A., & Ahmadabadi, M. N. (2019, November). Realization of nonlinear adaptive compliance: Towards energy efficiency in cyclic tasks. In 2019 7th International Conference on Robotics and Mechatronics (ICRoM) (pp. 175-180). IEEE.
- Nasiri, R., Rayati, M., & Ahmadabadi, M. N. (2019). Feedback from mono-articular muscles is sufficient for exoskeleton torque adaptation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 27(10), 2097-2106.
- Nasiri, R., Zare, A., Mohseni, O., Yazdanpanah, M. J., & Ahmadabadi, M. N. (2019). Concurrent design of controller and passive elements for robots with impulsive actuation systems. Control Engineering Practice, 86, 166-174.
- Khaghani, J., Nekoui, M., Nasiri, R., & Ahmadabadi, M. N. (2018, October). Analytical model of thermal soaring: Towards energy efficient path planning for flying robots. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 7589-7594). IEEE.
- Nekoui, M., Khaghani, J., Nasiri, R., & Ahmadabadi, M. N. (2018, October). Natural dynamics exploitation of dynamic soaring: Towards bio-inspired and energy efficient flying locomotion. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 8171-8176). IEEE.
- Nasiri, R., Ahmadi, A., & Ahmadabadi, M. N. (2018). Reducing the energy cost of human running using an unpowered exoskeleton. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26(10), 2026-2032.
- Shushtari, M., Nasiri, R., Yazdanpanah, M. J., & Ahmadabadi, M. N. (2017). Compliance and frequency optimization for energy efficiency in cyclic tasks. Robotica, 35(12), 2363-2380.
- Khoramshahi, M., Nasiri, R., Shushtari, M., Ijspeert, A. J., & Ahmadabadi, M. N. (2017). Adaptive natural oscillator to exploit natural dynamics for energy efficiency. Robotics and Autonomous Systems, 97, 51-60.
- Nasiri, R., Khoramshahi, M., Shushtari, M., & Ahmadabadi, M. N. (2016). Adaptation in variable parallel compliance: Towards energy efficiency in cyclic tasks. IEEE/ASME Transactions on Mechatronics, 22(2), 1059-1070.
- Mozaffari, S., Rekabi, E., Nasiri, R., & Ahmadabadi, M. N. (2016, October). Design & modeling of a novel multi-functional elastic actuator (MFEA). In 2016 4th International Conference on Robotics and Mechatronics (ICROM) (pp. 32-36). IEEE.
- Shakiba, M., Shadmehr, M. H., Mohseni, O., Nasiri, R., & Ahmadabadi, M. N. (2016, October). An adaptable cat-inspired leg design with frequency-amplitude coupling. In 2016 4th International Conference on Robotics and Mechatronics (ICROM) (pp. 37-41). IEEE.
- Nasiri, R., Khoramshahi, M., & Ahmadabadi, M. N. (2016, October). Design of a nonlinear adaptive natural oscillator: Towards natural dynamics exploitation in cyclic tasks. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3653-3658). IEEE.
- Khoramshahi, M., Nasiri, R., Ijspeert, A., & Nili Ahmadabadi, M. (2014). Energy efficient locomotion with adaptive natural oscillator (No. CONF).
نتایج:

درج خبر طراحی اسکلت خارجی غیرفعال در روزنامه نیویورک تایمز طراحی و ساخته شده در گروه رباتیک توانبخشی
مدلسازی بیومکانیکی حرکات پایین تنه

دست مصنوعی طراحی شده در موسسه پژوهشی رباتیک هوش مصنوعی و فناوری اطلاعات
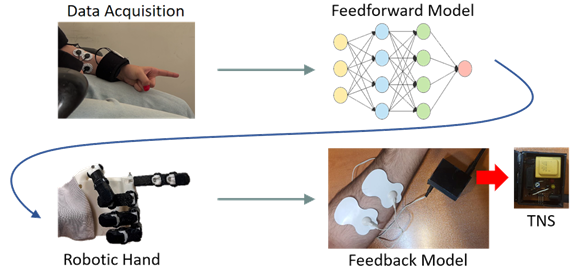
سیستم بازخورد پوستی و کنترل هوشمند دست مصنوعی