توسعه و کاربرد حسگرهای نیرو و لامسه در تعامل ربات با محیط
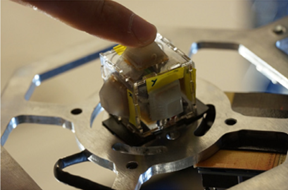
حسگر نیروی صلب مبتنی بر اثر هال
آزمایشگاه تعامل انسان و ربات دانشگاه تهران در زمینه توسعه سیستمهای رباتیکی پیشرفته فعالیت میکند که قادر به درک، تحلیل، و تعامل کارآمد با محیط اطراف خود باشند. این آزمایشگاه بر چالشهای اساسی در حوزه ادراک رباتیکی، تشخیص اشیا، برنامهریزی حرکت و اجرای خودکار وظایف تمرکز دارد. یکی از محورهای کلیدی این پژوهشها، بهبود تعامل فیزیکی رباتها با محیط از طریق حسگرهای نیرو و لامسه است. در این راستا، توسعه سیستمهای حسگری هوشمند که بتوانند اطلاعات دقیق و آنی از نیروهای اعمالی و نقاط تماس را ارائه دهند، نقش مهمی در افزایش کارایی و دقت رباتها دارد. سنسورهای نیرو و لامسه، علاوه بر کمک به درک سهبعدی صحنه و تشخیص روابط بین اشیا، در کنترل نیروهای اعمالی برای جلوگیری از آسیب به اشیا ظریف و افزایش ایمنی در فرآیندهای رباتیکی نیز مؤثر هستند. حسگرهای نیرو و لامسه نقشی کلیدی در بهبود عملکرد و تعامل رباتها با محیط دارند. این کاربردها شامل موارد زیر است:
- برداشتن و جابهجایی اشیای ظریف: حسگرهای نیرو به رباتها امکان میدهند تا هنگام گرفتن و جابهجایی اجسام شکننده یا حساس (مانند لامپهای شیشهای یا میوهها)، میزان نیروی وارده را تنظیم کرده و از آسیب احتمالی جلوگیری کنند.
- تشخیص لغزش: یکی از چالشهای مهم در گرفتن اشیا، جلوگیری از لغزش ناگهانی است. حسگرهای لامسه با اندازهگیری تغییرات نیروی تماس، امکان شناسایی لغزش را فراهم کرده و به ربات اجازه میدهند تا با تنظیم نیروی گرفتن، شیء را پایدار نگه دارد
- تنظیم نیروی بهینه برای گرفتن اجسام: استفاده از حسگرهای نیرو به رباتها کمک میکند تا نیروی لازم برای گرفتن هر شیء را متناسب با وزن، بافت و اصطکاک سطح آن تنظیم کنند، به طوری که نه بیش از حد محکم گرفته شود که موجب آسیب شود و نه بیش از حد ضعیف که باعث لغزش شود.
- اندازهگیری نیروهای چند محوری: حسگرهای نیرو با چند درجه آزادی، مانند حسگرهای شش محوره، امکان اندازهگیری نیروها و گشتاورهای واردشده از تمامی جهات را فراهم کرده و برای کنترل دقیقتر حرکات ربات در تعاملات پیچیده مورد استفاده قرار میگیرند.
- تطبیق گرفتن ربات با اشیای نامنظم یا حساس: برخی اشیا دارای شکلهای نامتقارن یا سطحهای انعطافپذیر هستند که گرفتن آنها را دشوار میکند. حسگرهای لامسه و نیرو به رباتها کمک میکنند تا بر اساس بازخورد لمسی، نحوه گرفتن را اصلاح کرده و توزیع نیروی تماس را بهینه کنند.
پژوهشهای آزمایشگاه تعامل انسان و ربات دانشگاه تهران
در آزمایشگاه تعامل انسان و ربات دانشگاه تهران، پژوهشهای فعلی در حوزه حسگرهای نیرو و لامسه شامل توسعه سنسورهای لامسه نرم مبتنی بر ترکیب دادهها و حسگرهای نیرو با شش درجه آزادی است.
- سنسورهای لامسه نرم: این حسگرها با استفاده از مواد انعطافپذیر طراحی شدهاند و میتوانند اطلاعات دقیقی از نیروی تماس در سطوح گسترده ارائه دهند. از این فناوری میتوان برای بهبود گرفتن اشیا و انجام وظایف حساس مانند مونتاژ قطعات کوچک و دستکاری اشیای زیستی استفاده کرد.
- حسگرهای نیرو با شش درجه آزادی: این حسگرها نیروها و گشتاورها را در تمامی جهات اندازهگیری کرده و امکان کنترل دقیق نیروهای تعاملی را فراهم میکنند. این فناوری برای کاربردهایی مانند رباتهای جراحی، توانبخشی و مونتاژ صنعتی پیشرفته مورد استفاده قرار میگیرد.
در مجموع، پژوهشهای انجامشده در این آزمایشگاه به دنبال توسعه سیستمهای حسگری پیشرفتهای هستند که توانایی رباتها را در درک و استفاده بهینه از نیروهای فیزیکی افزایش دهند. این فناوریها نه تنها تعاملات رباتیک را هوشمندتر و کارآمدتر میکنند، بلکه گامی مهم در جهت بهبود ایمنی، دقت و تطبیقپذیری رباتها با محیطهای متغیر به شمار میروند.
پروژه ها:
- اجتناب از مانع برای ربات بستر پویا به کمک واسطه لامسه ای در چارچوب کنترل پیش بین مبتنی بر مدل
- کنترل و شناسایی دینامیکی مکانیزم موازی 3 درجه آزادی مستقل (تریپترون) و ساخت واسط تعامل انسان و ربات
- طراحی و ساخت حسگر لمسی پوست مصنوعی برای کنترل یک ربات موازی سه درجه آزادی جهت تعامل ایمن انسان و ربات
- شناسایی کنترل یک ربات موازی سه درجه آزادی و ساخت حسگر نیرو با هدف تعامل انسان و ربات
- طراحی و ساخت حسگر نیرو مبتنی براثر هال
- طراحی ، ساخت و تحلیل داده های یک کفی کفش هوشمند با استفاده از حسگر لمسی نرم نیرو بر پایه بارومتر
- طراحی و ساخت یک کفپوش منعطف کفش هوشمند به منظور آنالیز حرکت انسان به وسیله شبکه های حسگر فشاری
اساتید:
- دکتر مهدی طالع ماسوله
- دکتر احمد کلهر
- دکتر محمدرضا نیری
واحدهای همکار:
- آزمایشگاه تعامل انسان و ربات تهران
مقالات برگزیده:
- Sharifzadeh, Mohammad, Mehdi Tale Masouleh, and Ahmad Kalhor. "Design, construction & calibration of a novel Human-Robot Interaction 3-DOF force sensor." In 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM), pp. 182-187. IEEE, 2015.
- Sharifzadeh, Mohammad, Mehdi Tale Masouleh, and Ahmad Kalhor. "On human–robot interaction of a 3-DOF decoupled parallel mechanism based on the design and construction of a novel and low-cost 3-DOF force sensor." Meccanica 52 (2017): 2471-2489.
- Shayan, Amir Mehdi, Arman Khazaei, Amin Hamed, Arsalan Amralizadeh, and Mehdi Tale Masouleh. "ShrewdShoe, a smart pressure sensitive wearable platform." In 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), pp. 458-463. IEEE, 2018.
- Hamed, Amin, Mehdi Tale Masouleh, and Ahmad Kalhor. "Design & characterization of a bio-inspired 3-dof tactile/force sensor for human-robot interaction purposes." In 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), pp. 488-493. IEEE, 2018.
- Hamed, Amin, and Mehdi Tale Masouleh. "Design and Prototyping of One Degree-of-Freedom Rehabilitation Robotic Arm with Variable Weights." In 2019 7th International Conference on Robotics and Mechatronics (ICRoM), pp. 519-525. IEEE, 2019.
- Hajshahvaladi, Leila, Arsalan Amralizadeh, Amin Hamed, Hamed Nazemi, and Mehdi Tale Masouleh. "Design and fabrication of a low cost optical tactile sensor." In 2019 7th International Conference on Robotics and Mechatronics (ICRoM), pp. 217-222. IEEE, 2019.
- Shayan, Amir Mehdi, Arman Khazaei, Amin Hamed, and Mehdi Tale Masouleh. "Design and development of a pressure-sensitive shoe platform for nao h25." In 2019 7th International Conference on Robotics and Mechatronics (ICRoM), pp. 223-228. IEEE, 2019.
- Hamed, Amin, Mehdi Tale Masouleh, and Ahmad Kalhor. "Design & characterization of a bio-inspired 3-DOF Tactile/Force sensor and implementation on a 3-DOF decoupled parallel mechanism for human-robot interaction purposes." Mechatronics 66 (2020): 102325.
- Amralizadeh, Arsalan, Trifa Marjani, Mehdi Tale Masouleh, and Ahmad Kalhor. "Design and fabrication of a flexible pressure-sensitive insole based on barometric tactile sensors." In 2020 28th Iranian Conference on Electrical Engineering (ICEE), pp. 1-5. IEEE, 2020.
- Shayan, Amir Mehdi, Arman Khazaei, Amin Hamed, Arsalan Amralizadeh, and Mehdi Tale Masouleh. "Design and development of ShrewdShoe, a smart pressure sensitive wearable platform." International Journal of Robotics, Theory and Applications 6, no. 1 (2020): 1-10.
- Zargarbashi, Fatemeh, Hamed Nazemi Harandi, Amin Hamed, and Mehdi Tale Masouleh. "An Experimental Study on the Design & Construction of a Torque Measurement Unit with Tactile Sensors." In 2020 28th Iranian Conference on Electrical Engineering (ICEE), pp. 1-5. IEEE, 2020.
- Nasab, Seyed Danial Moosavi, Arman Beiranvand, Mehdi Tale Masouleh, Fariba Bahrami, and Ahmad Kalhor. "Design and development of a multi-axis force sensor based on the hall effect with decouple structure." Mechatronics 84 (2022): 102766.
- Ehsani, Amirhossein, Navid Asadi Khomami, Meysam Ghaneie, and Mehdi Tale Masouleh. "Design and Fabrication of an Optimized Six-Axis Force-Torque Sensor." In 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), pp. 598-605. IEEE, 2023.
نتایج:
|
حسگر نیروی صلب و حسگر نیروی نرم |
حسگر نیروی صلب مبتنی بر اثر هال |

|
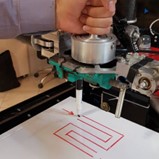
دستگاه توان بخشی طراحی شده در آزمایشگاه تعامل انسان و ربات |
نمونه اولیه دستگاه توان بخشی |


|
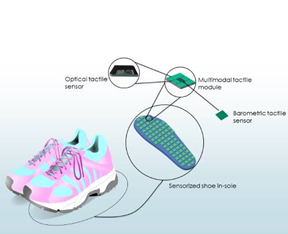
حسگر کفش هوشمند |
کفش هوشمند برای کنترل پایداری ربات انساننما ی نائو |

|
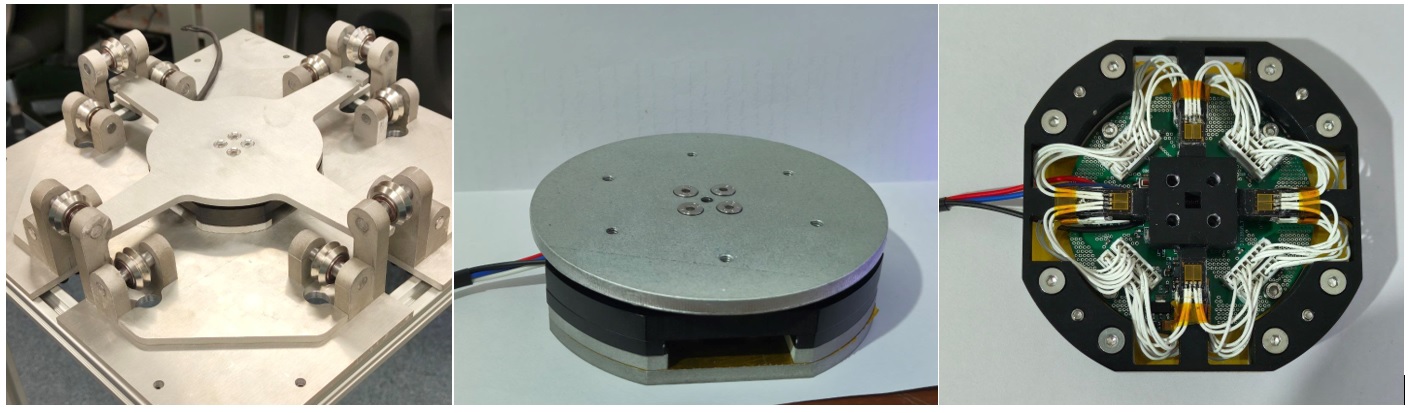
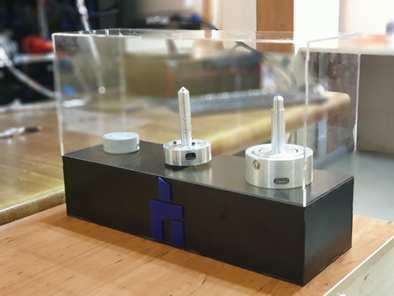
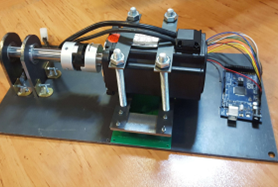
حسگر نیرو شش جهته |
مجموعه اندازه گیری گشتاور وارد بر موتور |
|
حسگر نیروی شش درجه آزادی به همراه مجموعه ی کالیبراسیون |
|
|
نمونه اولیه ی حسگر نیرو لامسه ی نرم |