مدلسازی مدون ربات های سری - موازی الهام گرفته شده از طبیعت
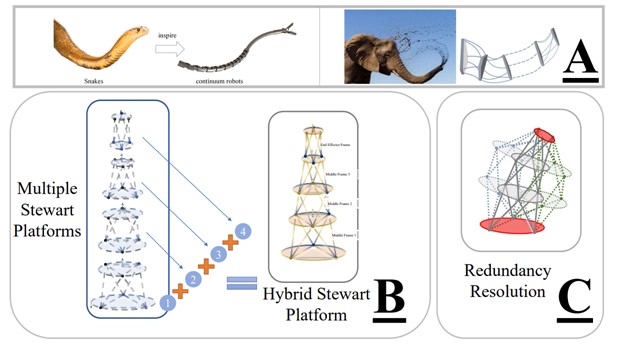
A) مکانیزم هیبرید موازی الهام گرفته شده از طبیعت [Zhang (2022). Huang (2022)]. B) نمای کلی ربات افزونه سری-موازی بر پایه سکوی گاف-استوارت.
C) نمایی از افزونگی
مکانیزم های رباتیک سری-موازی که از اتصال سری چندین ربات موازی ایجاد می شوند، ویژگی و مزایای فراوانی دارند. یکی از مزایای ربات های افزونه سری-موازی، شباهت معماری آن ها با ساختار های بیولوژیک موجود در طبیعت می باشد. با توجه به این شباهت، این نوع از مکانیزم ها در شاخه ای از رباتیک که به طراحی و توسعه ربات های الهام گرفته از طبیعت می پردازد، کاربرد فراوانی دارد. در چنین ربات هایی، ارائه یک مکانیزم که بتواند انعطاف و تطبیق پذیری ساختارهای بیولوژیک را شبیه سازی کند، اهمیت فراوانی دارد. برای مثال ربات هایی با الهام از ساختار بدن مار، دم گربه، خرطوم فیل، و دست و پای انسان می تواند طراحی شود و توسعه یابد. چنین ربات هایی، قابلیت فعالیت در محیط های پیچیده و محدود را فراهم می کنند. همچنین این ربات ها در کاربردهایی که دقت بالا در موقعیت مجری نهایی اهمیت فراوانی دارد، نظیر جراحی رباتیک بسیار مفید است.
با ترکیب ساختار سینماتیکی ربات های سری و موازی با یکدیگر، مزایای مکانیکی این دو نوع ربات با یکدیگر ترکیب شده و ساختار جدیدی را پدیدار می کند. به عبارت دیگر، این ربات ها قابلیت فراهم کردن مزایایی از قبیل فضای کاری گسترده، سختی مکانیکی و کارکرد در سرعت های بال را دارد، که به تنهایی توسط یک ربات سری و یا موازی ممکن نیست. با توجه به تعداد قابل توجه عملگرها در مکانیزمهای سری-موازی در مقایسه با تعداد درجات آزادی، افزونگی و فوقافزونگی در ویژگی اکثر این مکانیزمها به چشم میخورد. افزونگی ربات در حل معادلات سینماتیک معکوس آن نمایان شده و به ازای یک نقطه مدنظر در فضای کاری، بیشمار پاسخ در فضای عملگر ایجاد میکند. با استفاده از روشهای استاندارد تحلیلی و یا عددی، این افزونگی تحت یک مساله بهینهسازی حل شده تا بهترین پاسخ ممکن یافته و استفاده شود. در بسیاری از فرایندها نظیر ماشینکاری از این نوع مکانیزم ها استفاده می شود.
در آزمایشگاه تعامل انسان و ربات، یکی از موضوعات مطرح شده، مدلسازی، طراحی و توسعه ربات های سری-موازی بر پایه سکوی گاف استوارت می باشد. این ربات ها از اتصال سری چند سکوی 6 درجه آزادی گاف-استوارت بوجود آمده و تمامی ویژگی های ذکر شده ربات های سری-موازی را دارند. در سال های اخیر، قدم های مهمی در حوزه مدلسازی این ربات ها در این آزمایشگاه برداشته شده است. ارائه یک مدل کلی برای حل مساله سینماتیک مستقیم و معکوس چنین ربات هایی توانسته پایه استواری برای ارائه مدل های پیچیده تر، نظیر مدل دینامیکی باشد. ارائه مدل دقیق دینامیکی اینگونه رباتها به همراه ارائه مدل کاهش یافته آن برای سهولت در پیادهسازی الگوریتمها از دیگر تحقیقات در حال انجام است. همچنین، به منظور بهبود عملکرد و دقت چنین ربات هایی، ارائه راهکارهای کنترلی نیز اهمیت فراوان دارد. یکی از شاخصهای مهم برای ارزیابی عملکرد رباتها، شاخص حساسیت سینماتیکی است که محاسبه این شاخص برای رباتهای هیبرید توانسته است معیار خوبی برای ارزیابی دقت این رباتها ارائه دهد. علاوه بر کنترل سینماتیکی و دینامیکی این ربات ها، ارائه مدل های کنترلی تحمل پذیر عیب نیز از موضوعات تحت بررسی در آزمایشگاه می باشد. کنترل موقعیت، پایدارسازی و ردیابی مسیر مجری نهایی از دیگر پژوهشهای در حال انجام این آزمایشگاه است. همچنین در راستای استفاده روش های مبتنی بر هوش مصنوعی، استفاده از شبکه های عصبی و الگوریتم های هوش مصنوعی در مدلسازی سینماتیک و دینامیک این ربات ها نیز از دیگر اهداف در حال بررسی در آزمایشگاه تعامل انسان و ربات می باشد.
پروژهها:
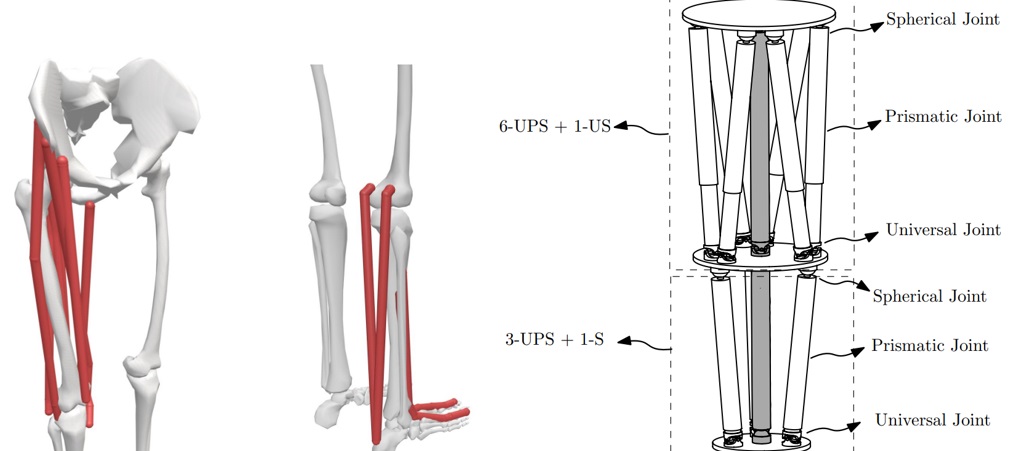
- عنوان پروژه پارسا نمازیان: تحلیل سینماتیکی، بهینه سازی و طراحی پای ربات انسان نما بر پایه مکانیزم های سری-موازی
- عنوان پروژه امیرحسین نوریان:
- عنوان پروژه کمالی: تحلیل دینامیکی رباتهای گاف-استوارت موازی با چیدمان سری
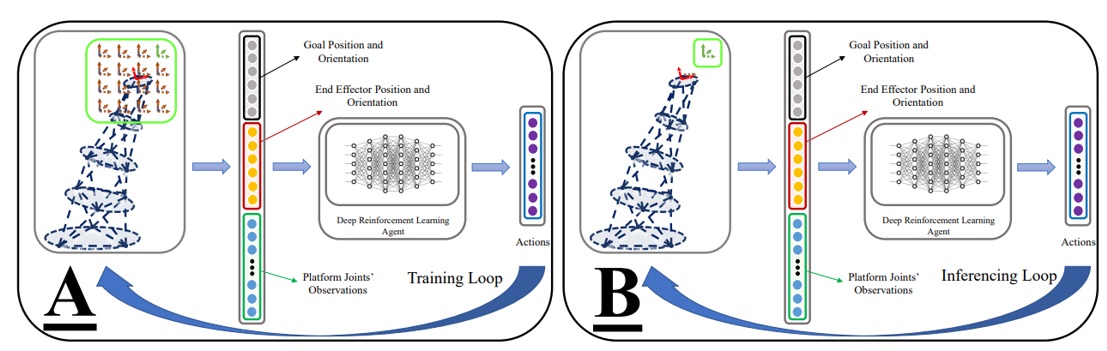
- عنوان پروژه منتظری: مدل سازی سینماتیکی و طراحی پای ربات انسان نما با ربات های موازی استوارت افزونه به روش یادگیری عمیق
- عنوان پروژه یزدانی: کنترل ربات موازی گاف-استوارت با چیدمان سری جهت جبران اغتشاشات وارد بر پایه
- عنوان پروژه زند: محاسبه ی شاخص های حساسیت سینماتیکی برای ربات های هیبرید
- عنوان پروژه اکبری: تحلیل دینامیکی ربات سری موازی گاف استوارت مبتنی بر حداقل پارامترهای سیستم
اساتید:
- دکتر مهدی طالع ماسوله
- دکتر احمد کلهر
- دکتر محمدرضا حائری یزدی
- دکتر محمدرضا نیری
- دکتر محمدرضا ذاکرزاده
واحدهای همکار:
آزمایشگاه تعامل انسان و ربات دانشگاه تهران
مقالات برگزیده:
- Kamali Ardakani, Alireza, Hossein Akbari, Parsa Namazian, Mehdi Tale Masouleh, and Arash Bahrami. " Dynamic Modeling of Double Segment Redundant Gough-Stewart Hybrid Manipulator based on the Principle of Virtual Work." In 2024 12th RSI International Conference on Robotics and Mechatronics (ICRoM). IEEE, 2024.
- Namazian, Parsa, Mehdi Tale Masouleh, and Mohammad Reza Zakerzadeh. "SPAR-Leg: Serial-Parallel Anthropomorphic Robotic Leg." In 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), pp. 876-883. IEEE, 2023.
- Nourian, Amirhossein, Mohammadreza Ghazavi, Mehdi Tale Masouleh. "Generalized Kinematic Solution of Hyper Redundant Multi Gough-Stewart Platform connected serially using Deep Reinforcement Learning with Time Optimization."
- Zand, Niusha, Parsa Namazian, Mehdi Tale Masouleh. " Kinematic-Sensitivity Indices of Double Gough-Stewart Platform." In 2024 12th RSI International Conference on Robotics and Mechatronics (ICRoM). IEEE, 2024.
- Lafmejani, Amir Salimi, Mehdi Tale Masouleh, and Ahmad Kalhor. "Trajectory tracking control of a pneumatically actuated 6-DOF Gough–Stewart parallel robot using Backstepping-Sliding Mode controller and geometry-based quasi forward kinematic method." Robotics and Computer-Integrated Manufacturing 54 (2018): 96-114.
- Gheybi, Mohammad Mahdi, Hediye Moghimi, Parsa Namazian, Payam Varshovi-Jaghargh, Mehdi Tale Masouleh. " Workspace Calculation of the 2(6-UPS) Hybrid Manipulator." In 2024 12th RSI International Conference on Robotics and Mechatronics (ICRoM). IEEE, 2024.
- Damnab, Mohammad Behdad Mohammadi, Mehdi Tale Masouleh, and Mohammad Reza Haeri Yazdi. "Designing and developing a 6-dof calibration setup based on the gough-stewart platform equipped by potentiometer sensors." In 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), pp. 363-370. IEEE, 2023.
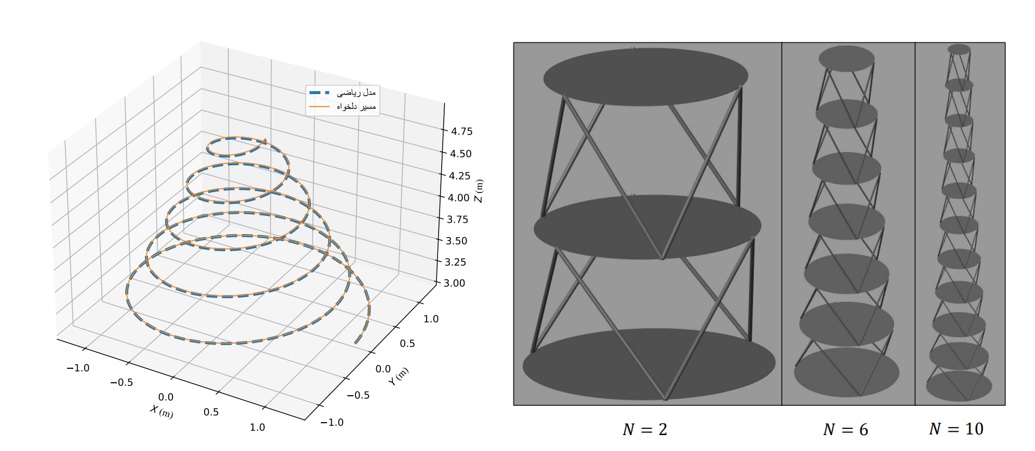

مدل شبکهعصبی مورد استفاده برای یادگیری سینماتیک مستقیم ربات افزونه گاف-استوارت - دنبال کردن مسیر توسط مجری نهایی